








کنترلر قابل برنامه ریزی با میکرو کنترلر
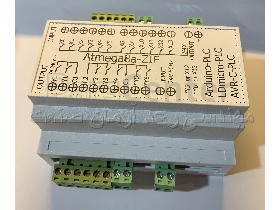
کنترلر قابل برنامه ریزی با میکروکنترلر تعداد 12 ورودی و 5 خروجی رله ایی 7 آمپر دارد با ولتاژ 24 ولت برق مستقیم و یا یک ترانس 24 برق شهر کار میکند. دارای جعبه مشابه plc هست هست.
قیمت
اطلاعات تامین کننده
مهندسی رعد آرمان صنعت
تهرانتولید کننده، وارد کننده، عمده فروش، خرده فروش، صادر کننده، خدمات
ریموت کنترل جرثقیل، تابلو برق صنعتی، تابلو جرثقیل، ریموت بیسیم جرثقیل، تابلو برق، گیرنده بیسیم، بیسیم صنعتی، گیرنده بیسیم برد بلند، تابلو اتوماسیون
مشاهده سایت فروشندهخرید از تامین کنندگان برتر پارس سنتر!

تامین کنندگان برتر پارس سنتر سرعت پاسخگویی بالاتر و محصولات بروز تری نسبت به سایر تامین کنندگان دارند.


مشخصات
- شرکت سازنده
- مهندسی رعد آرمان صنعت
- مدل
- PLC_12I/5O
- کشور سازنده
- ایران
- نوع آی سی
- DIP ATMEGA8A
- برنامه ریزی
- با یو اس بی آردینو CH340
- ترمینال
- فونیکیسی 5 میلیمتری کشویی
- برنامه ریزی
- با یک پرگرامر AVR معمولی
- پایه های آی سی
- زیف
- نوع نصب
- ریلی و اندازه 6 تا مینیاتوری تک فاز
- تعداد خروجی
- 5 تا رله ایی 7 آمپر
- تعداد ورودی
- 12 تا ورودی فعال با منفی
- تعذیه
- 24 ولت یک ترانس یا تعذیه سویچینگ
- ابعاد
- W107 X D58.7 X H87.5 mm
توضیحات محصول
کنترلر قابل برنامه ریزی با میکروکنترلر
تعداد 12 ورودی و 5 خروجی رله ایی 7 آمپر دارد
با ولتاژ 24 ولت برق مستقیم و یا یک ترانس 24 برق شهر کار میکند.
دارای جعبه مشابه plc هست هست.
قابلیت افزایش ماژول ارسال دریافت بین دو کنترلر بصورت بیسیم امکان پذیر ست.
طراحی مدار فرمان به سادگی با دستورات AND OR معمولی در کامپایلر آردینو و سایر کامپایلرها بسادگی قابل انجام است.
در صورتی که برنامه ایی دارید بصورت لدر و یا کد میتونید به ما بدهید تا برای شما پرگرام شده تحویل دهیم.
در تعداد نسبت به PLC قیمت مناسب
نوع میکروکنترلر برای برنامه های ساده و کم حجم ATMEGA8A
و برای برنامه های حجیم از میکرو کنترلر ATMEGA328
دیپ بصورت سوکتی قابل تعویض است.
قابلیت برنامه نویسی با زبان لدر ( با AND OR = ) و به زبان سی و یا اسمبلی یا بیسیک و ... .
قابل برنامه ریزی با نرم افزار LDMICRO https://cq.cx/ladder.pl
برای دریافت برنامه از این لینک استفاده کنید
https://cq.cx/dl/ldmicro.exe
وضیعت اتصالات جهت استفاده نرم افزاری و برنامه نویسی.
ورودی های تعریف شده ، در وضعیت وصل داخل میکرو صفر را نشان میدهد و در وضعیت قطع یک را نشان میدهد ، ترمینال ورودی با وصل به منفی وضعیت ریجیستر میکرو را صفر میکند و با قطعش یک میشود ورودی داخل میکرو باید حتما پول آپ تنظیم شود.
//input pin , input status 1=off on=0, all input must softwear pull-up
sbit X0 at PINB.B5;
sbit X1 at PINB.B4;
sbit X2 at PINB.B3;
sbit X3 at PINB.B2;
sbit X4 at PINB.B1;
sbit X5 at PINC.B0;
sbit X6 at PIND.B3;
sbit X7 at PIND.B4;
sbit X8 at PIND.B5;
sbit X9 at PIND.B6;
sbit X10 at PIND.B7;
sbit X11 at PINB.B0;
خروجیهای میکرو که به رله وصل شده است ریجیستر اگر یک شود خروجی وصل میشود.
// output for relay
sbit Y0 at PORTC5_bit;
sbit Y1 at PORTC4_bit;
sbit Y2 at PORTC3_bit;
sbit Y3 at PORTC2_bit;
sbit Y4 at PORTC1_bit;
در مدار این سه پین با هدر و یک مثبت و منفی در مدار وجود دارد جهت استفاده خارجی ، همیچین این دو پین خروجی سریال میکرو هم هست که با ماژول میشود استفاده سریال انجام داد و یا rs485 و یا ماژول بیسیم استفاده کرد و ارتباط دو کنترلر را بصورت بیسیم با هم داشت.
// SHIFT RIGISTER output pin
sbit serial_data at PORTD0_bit; // RXD
sbit shift_register at PORTD1_bit; // TXD
sbit storage_register at PORTD2_bit;
وضیعت ترمینال های ورودی و تغذیه ورودی ها و سنسورها
[X0 X1 X2 X3 X4 X5 X6 X7 X8 X9 X10 X11 -- X12 X13 ] [- +]
ترمینالهای ورودی با وردی منفی فعال و قطعش غیر فعال میگردد.
[- +] ترمینال خروجی منفی و مثبت جهت استفاده پروکسیمیتی و سنسورها ی نیاز به تغذیه دارن مورد استفاده قرار میگیرند.
X12 و X13 قابل جابجایی با دو رله آخر در صورت نیاز، این دو ورودی با سلکتور هدر میشود به ورودی و خروجی تبدیل شود و در برنامه نویس تغییرات لازم را باید انجام داد.
گروه ترمینالهای تغذیه ورودی و خروجی ها:
[Y0 Y1 C1 C2 Y2 Y3 Y4 C3 -- Y5 Y6] [ ~ ~]
C= common
مشترک هر دو رله با گروه بندی نشان داده شده است
دو خروجی آخر قابل اضافه کردن دو رله بصورت شناور و درفضای خالی جعبه با سیم است
این دو خروجی با دو ورودی آخر قابل جابجایی است با دو سلکتور
[ ~ ~] این دو ترمینال جهت تغذیه است و با یک ترانس معمولی 24 ولت قابل کار کردن هست در صورت نیاز میشود به یک تغذیه 24 برق مستقیم وصل کرد و جابجایی منفی و مثبت تاثیری ندارد.
نمونه برنامه آردینو روی میکروکنترلر ATMEGA8A
خروجیها با تاخیر یک ثاینه روشن و خاموش میشود یکی پس از دیگری.
// خروجیها با تاخیر یک ثاینه روشن و خاموش میشود یکی پس از دیگری.
// اعلان پینهای ورودی
const int X0 = 13; // PB5
const int X1 = 12; // PB4
const int X2 = 11; // PB3
const int X3 = 10; // PB2
const int X4 = 9; // PB1
const int X5 = A0; // PC0
const int X6 = 3; // PD3
const int X7 = 4; // PD4
const int X8 = 5; // PD5
const int X9 = 6; // PD6
const int X10 = 7; // PD7
const int X11 = 8; // PB0
// اعلان پینهای خروجی
const int Y0 = A5; // PC5
const int Y1 = A4; // PC4
const int Y2 = A3; // PC3
const int Y3 = A2; // PC2
const int Y4 = A1; // PC1
const int R1 = 2; // PD2 // DIGITAL OUTPUT HEADER PIN
//const int R2 = 1; // PD1 // DIGITAL OUTPUT HEADER PIN TX PIN
//const int R3 = 0; // PD0 // DIGITAL OUTPUT HEADER PIN RX PIN
//const int Y5 = 7; // PD7 IF NEED OUTPUT DESABLE X10
//const int Y6 = 8; // PB0 IF NEED OUTPUT DESABLE X11
// متغیر نگهداری وضعیت فعلی خروجیها
int currentOutput = 0;
void setup() {
// تنظیم ورودیها به عنوان pull-up
pinMode(X0, INPUT_PULLUP);
pinMode(X1, INPUT_PULLUP);
pinMode(X2, INPUT_PULLUP);
pinMode(X3, INPUT_PULLUP);
pinMode(X4, INPUT_PULLUP);
pinMode(X5, INPUT_PULLUP);
pinMode(X6, INPUT_PULLUP);
pinMode(X7, INPUT_PULLUP);
pinMode(X8, INPUT_PULLUP);
pinMode(X9, INPUT_PULLUP);
pinMode(X10, INPUT_PULLUP);
pinMode(X11, INPUT_PULLUP);
// تنظیم خروجیها
pinMode(Y0, OUTPUT);
pinMode(Y1, OUTPUT);
pinMode(Y2, OUTPUT);
pinMode(Y3, OUTPUT);
pinMode(Y4, OUTPUT);
//pinMode(Y5, OUTPUT); //IF NEED OUTPUT DESABLE X10
// pinMode(Y6, OUTPUT); //IF NEED OUTPUT DESABLE X11
delay(5000);// تاخیر بالا اومدن
}
// HEADR PIN WITH 6 PIN
// -------------------PIN1
// 0 | 0 | 0 | 0 | 0 | 0 |
// -----------------------
// NON PD2 TX RX VCC GND
void loop() {
// خاموش کردن تمام خروجیها
digitalWrite(Y0, LOW);
digitalWrite(Y1, LOW);
digitalWrite(Y2, LOW);
digitalWrite(Y3, LOW);
digitalWrite(Y4, LOW);
// روشن کردن خروجی مورد نظر
digitalWrite(getCurrentOutputPin(), HIGH);
// تاخیر 1 ثانیه
delay(1000);
// گردش به ترتیب خروجیها
currentOutput = (currentOutput + 1) % 5;
}
// تابع بازگشتی برای دریافت پین مرتبط با خروجی فعلی
int getCurrentOutputPin() {
switch (currentOutput) {
case 0:
return Y0;
case 1:
return Y1;
case 2:
return Y2;
case 3:
return Y3;
case 4:
return Y4;
default:
return Y0;
}
}
سایر محصولات و خدمات شرکت
-
![فلوتر بیسیم یا وایرلس]() فلوتر بیسیم یا وایرلس
فلوتر بیسیم یا وایرلستجهیزات برق صنعتی - سایر
-
![کلید ریموت تایوانی N80C20]() کلید ریموت تایوانی N80C20
کلید ریموت تایوانی N80C20تجهیزات برق صنعتی - سایر
-
![راه انداز موتور سه فاز اینورتردار با برق تک فاز]() راه انداز موتور سه فاز اینورتردار با برق تک فاز
راه انداز موتور سه فاز اینورتردار با برق تک فازموتور الکتریکی
-
![ریموت بیسیم و گیرنده بالابر و نفربر و غذابر]() ریموت بیسیم و گیرنده بالابر و نفربر و غذابر
ریموت بیسیم و گیرنده بالابر و نفربر و غذابرریموت کنترل
-
![ریموت بیسیم جرثقیل 6 کانال دو سرعته]() ریموت بیسیم جرثقیل 6 کانال دو سرعته
ریموت بیسیم جرثقیل 6 کانال دو سرعتهریموت کنترل








